|
Патентная документация ЕАПВ |
|
||
| Запрос: | ea000013010b*\id |
|
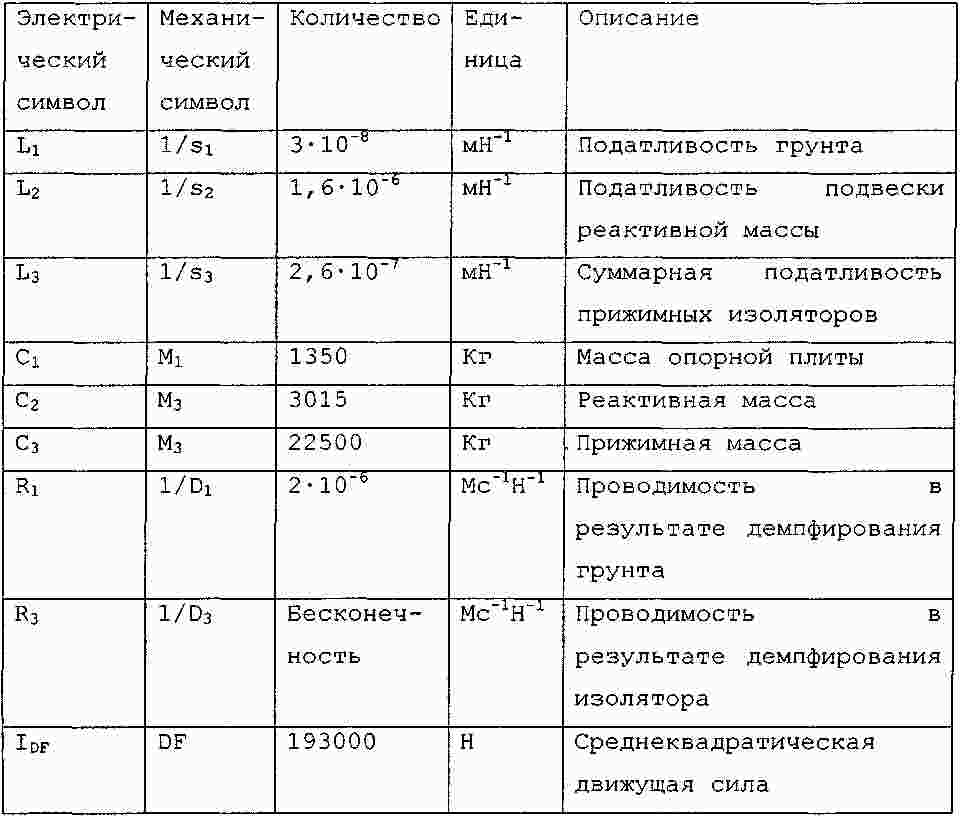
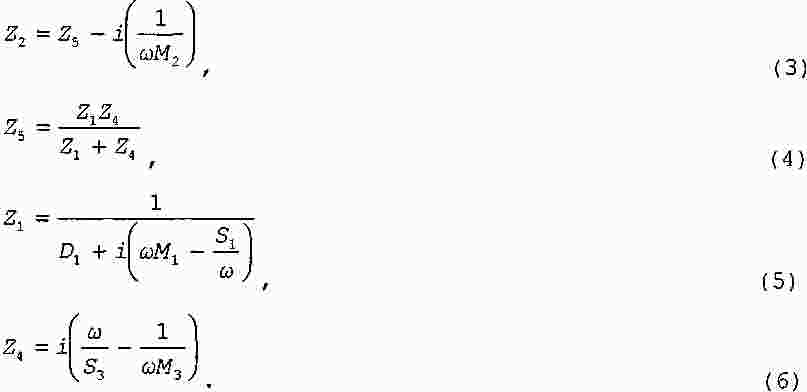
Термины запроса в документе Реферат В общем, это изобретение относится к вибросейсмическому способу, а более конкретно, но без ограничения, к оптимизации интенсивности сигналов и/или повышению низкочастотного состава в сейсмических сигналах, предназначенных для использования при исследовании буровых скважин и/или подземных формаций. В осуществлениях настоящего изобретения физические свойства сейсмического вибратора могут быть проанализированы и использованы для определения движущей силы, необходимой для приведения в движение реактивной массы, чтобы образовать свип-сигнал с повышенным низкочастотным составом, предназначенный для инжекции в толщу пород при вибрационной сейсмике. Согласно некоторым аспектам физические свойства могут полагаться независимыми от любых геофизических свойств, имеющих отношение к работе сейсмического вибратора. Формула [0001] Способ повышения низкочастотной составляющей энергии сигнала качающейся частоты, излучаемого сейсмическим вибратором в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины, при этом способ содержит этапы, на которых [0002] Способ повышения низкочастотной составляющей энергии сигнала качающейся частоты, излучаемого сейсмическим вибратором в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины по п.1, в котором определение пикового смещения реактивной массы, относящегося к реактивной массе в сейсмическом вибраторе, для одной или нескольких частот сигнала качающейся частоты осуществляют независимо от геофизических свойств подземной формации или буровой скважины. [0003] Способ повышения низкочастотной составляющей энергии сигнала качающейся частоты, излучаемого сейсмическим вибратором в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины по п.1, в котором моделирующую функцию получают из электрической схемы, эквивалентной сейсмическому вибратору. [0004] Способ повышения низкочастотной составляющей энергии сигнала качающейся частоты, излучаемого сейсмическим вибратором в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины, при этом способ содержит этапы, на которых [0005] Способ по п.4, в котором моделирующая функция является независимой от физических свойств земной поверхности. [0006] Способ по п.4, в котором механические характеристики содержат, по меньшей мере, пиковое смещение реактивной массы и среднюю частоту, на которой происходит пиковое смещение, и в котором пиковое смещение представляет собой наибольшее возможное смещение реактивной массы от плиты-возбудителя, которое сейсмический вибратор способен создавать. [0007] Способ по п.4, в котором моделирующая функция является функцией, связывающей в частотной области максимальное смещение реактивной массы, относящееся к реактивной массе, от положения покоя с движущей силой, прикладываемой к реактивной массе, и сопротивлением движению реактивной массы. [0008] Способ по п.4, в котором процессор обрабатывает сигнал возбуждения на основании механических характеристик и параболической аппроксимации моделирующей функции. [0009] Способ по п.4, в котором сигнал возбуждения конфигурируют для повышения амплитуд частот ниже чем 10 Гц в сигнале качающейся частоты. [0010] Система для излучения сигнала качающейся частоты с повышенным низкочастотным составом в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины, содержащая [0011] Система для излучения сигнала качающейся частоты с повышенным низкочастотным составом в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины по п.10, в которой пиковое смещение реактивной массы для по меньшей мере одной или нескольких частот сигнала качающейся частоты определяется экспериментально. [0012] Система для излучения сигнала качающейся частоты с повышенным низкочастотным составом в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины по п.11, в которой аппроксимируется функция для пикового смещения реактивной массы для одной или нескольких частот и используется для экстраполяции дальше пиковых смещений реактивной массы для дополнительных частот в сигнале качающейся частоты. [0013] Система для излучения сигнала качающейся частоты с повышенным низкочастотным составом в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины по п.10, в которой пиковое смещение реактивной массы для по меньшей мере одной или нескольких частот сигнала качающейся частоты определяется на основании моделирующей функции. [0014] Система для излучения сигнала качающейся частоты с повышенным низкочастотным составом в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины по п.13, в которой моделирующая функция получается из электрической схемы, эквивалентной сейсмическому вибратору. [0015] Система для излучения сигнала качающейся частоты с повышенным низкочастотным составом в нижележащие слои под земной поверхностью для сейсмического исследования подземной формации или буровой скважины, содержащая [0016] Система по п.15, в которой моделирующая функция является независимой от физических свойств земной поверхности. [0017] Система по п.15, в которой моделирующая функция является функцией, связывающей в частотной области максимальное смещение реактивной массы, относящееся к реактивной массе, от положения покоя с движущей силой, прикладываемой к реактивной массе, и сопротивлением движению реактивной массы. [0018] Система по п.15, в которой процессор обрабатывает сигнал возбуждения на основании механических характеристик и параболической аппроксимации моделирующей функции. [0019] Система по п.15, в которой сигнал возбуждения сконфигурирован для повышения амплитуд частот ниже чем 10 Гц в сигнале качающейся частоты. [0020] Способ управления сейсмическим вибратором путем использования частотно-зависимого сигнала управления, в котором мгновенное значение сигнала управления основано на оценке эквивалентной модели вибратора, и значение выбирают для увеличения до максимума энергии вибратора, вводимой в грунт, в пределах заданного частотного интервала, используя граничные значения, получаемые на основании сочетания модели со входными значениями, основанными на характеристике вибратора. [0021] Способ по п.20, в котором сигнал управления выбирают из группы, состоящей из пикового смещения реактивной массы, движущей силы, амплитуды свип-сигнала или эквивалентов их. [0022] Способ по п.20, в котором входные значения выбирают из группы, состоящей из максимального хода вибратора, максимальной движущей силы или ускорения вибратора, размера гидравлических аккумуляторов вибратора, максимальной производительности гидравлической системы вибратора. Полный текст патента Уровень техники В общем, это изобретение относится к вибросейсмическому способу, а более конкретно, но без ограничения, к оптимизации интенсивности сигналов и/или повышению низкочастотного состава сейсмических сигналов, предназначенных для использования при исследовании буровых скважин и/или подземных формаций. В нефтегазовой промышленности методы геофизической разведки широко используют для содействия поиску и оцениванию подземных месторождений углеводородов. Обычно источник сейсмической энергии используют для излучения сейсмического сигнала, который проходит в толщу пород и, по меньшей мере, частично отражается подземными сейсмическими отражающими горизонтами (т.е. границами раздела между подземными формациями, имеющими различные акустические импедансы). Отражения регистрируются сейсмическими датчиками, расположенными на или вблизи поверхности толщи пород, в массе воды или на известных глубинах в буровых скважинах, и результирующие сейсмические данные могут быть обработаны для получения информации, касающейся местоположения подземных отражающих горизонтов и физических свойств подземных формаций. Чтобы излучить сейсмический сигнал, при геофизическом исследовании одного вида используют импульсный источник энергии, такой как динамит или морская воздушная пушка. В случае импульсного источника энергии большое количество энергии инжектируется в грунт в течение очень короткого периода времени. В соответствии с этим результирующие данные обычно имеют относительно высокое отношение сигнала к шуму, которое облегчает выполнение последующих операций по обработке данных. С другой стороны, при использовании импульсного источника энергии могут возникать некоторые опасения относительно безопасности и экологии. С поздних 1950-х и ранних 1960-х годов используют геофизическую разведку нового вида, большей частью известную как вибросейсмическая (VIBROSEIS ®) разведка. При вибросейсмической разведке в качестве источника энергии используют наземный или морской сейсмический вибратор. При сейсмических исследованиях, проводимых на суше, сейсмический вибратор передает в грунт сигнал, имеющий намного меньшую энергию, чем сигнал, образуемый импульсным источником энергии, однако сейсмический вибратор может генерировать сигнал в течение более продолжительных периодов времени. Вибраторы, предназначенные для использования при морском сейсмическом исследовании, обычно содержат колоколообразный корпус, имеющий на своем открытом конце большую и тяжелую диафрагму, эквивалентную упоминаемой ниже опорной (излучающей) плите. Вибратор спускают в воду с морского исследовательского судна, и диафрагма приводится в колебание гидравлической приводной системой, аналогичной используемой в наземном вибраторе. Альтернативные конструкции морских вибраторов содержат две сплошные криволинейные или полусферические оболочки, соединенные друг с другом посредством упругой мембраны. Гидравлический привод приводит в движение две оболочки относительно друг друга, подобно приведению в движение реактивной массы в наземном вибраторе. Поэтому морские вибраторы находятся под влиянием эксплуатационных ограничений, аналогичных эксплуатационным ограничениям наземных вибраторов. Сейсмический сигнал, генерируемый сейсмическим вибратором, является управляемым волновым цугом, свип-сигналом, содержащим различные частоты, который может быть излучен в поверхность толщи пород, массу воды или буровую скважину. В сейсмическом вибраторе, предназначенном для использования на суше, энергия может быть передана в толщу пород в виде сигнала с качающейся частотой. Обычно энергия, подлежащая передаче в толщу пород, создается гидравлической приводной системой, которая вызывает вибрации большой массы, известной в качестве реактивной массы, двигающейся то вверх, то вниз. Реактивная масса связана с опорной плитой, которая находится в контакте с грунтом и через которую вибрации передаются в грунт. Очень часто опорную плиту связывают с большим фиксированным грузом, известным в качестве прижимного груза, который поддерживает контакт между опорной плитой и грунтом, когда реактивная масса совершает движения вверх и вниз. Сейсмический свип-сигнал, создаваемый сейсмическим вибратором, может быть синусоидальной вибрацией с непрерывно изменяющейся частотой, возрастающей или спадающей монотонно в пределах заданного частотного диапазона. Сейсмические свип-сигналы часто имеют длительности от 2 до 20 с. Мгновенная частота сейсмического свип-сигнала может изменяться линейно или нелинейно со временем. Показатель изменения мгновенной частоты на протяжении единичного интервала времени определяет скорость свипирования. Кроме того, частота сейсмического свип-сигнала может начинаться с низкой и повышаться со временем, свип вверх, или может начинаться с высокой и постепенно снижаться, свип вниз. Сейсмические данные, регистрируемые во время вибросейсмической разведки (в дальнейшем называемые «вибросейсмическими данными »), представляют собой составные сигналы, каждый из которых состоит из многочисленных протяженных, отраженных волновых цугов, наложенных друг на друга. Поскольку эти составные сигналы обычно являются во много раз более продолжительными, чем интервал между отражениями, то можно выделять отдельные отражения из зарегистрированного сигнала. Однако когда осуществляют взаимную корреляцию вибросейсмических данных со свип-сигналом (также известным в качестве «опорного сигнала »), то результирующие коррелированные данные аппроксимируют данные, которые регистрируют, как если бы имелся импульсный источник энергии. Количество энергии, инжектируемой в грунт сейсмическим вибратором в продолжение обычного вибросейсмического свип-сигнала, определяется размером вибратора и длительностью свип-сигнала. Имеются несколько ограничений на амплитуду вибраций. Наиболее существенное из них заключается в том, что прижимная масса должна превышать максимальную, направленную вверх силу, с тем, чтобы никогда не утрачивался контакт вибратора с грунтом. Однако имеются другие ограничения на низкочастотный выходной сигнал. Как уже упоминалось, вибрацией реактивной массы и опорной плиты создается толкающее усилие. Сила, передаваемая в грунт, равна сумме ускорений реактивной массы и опорной плиты, взвешенных по реактивной массе и массе опорной плиты соответственно. На низких частотах основная составляющая толкающего усилия несомненно является той, которая обусловлена реактивной массой, поскольку ускорение опорной плиты является пренебрежимо малым по сравнению с ускорением реактивной массы. По этой причине для создания аналогичного толкающего усилия на низких частотах требуются более высокие пиковые скорости и смещения реактивной массы, чем на более высоких частотах. Обычно самая низкая частота, которая может быть образована вибратором при фиксированном уровне силы, определяется максимальной длиной хода, возможной для реактивной массы, а величина временного отрезка, на котором сейсмический вибратор может использоваться на низких частотах, определяется количеством гидравлической жидкости, запасенной в аккумуляторах на начальный момент свип-сигнала, и максимальной пропускной способностью гидравлической системы. Вследствие различных факторов, влияющих на низкочастотный сигнал, сейсмические вибраторы предшествующего уровня техники образуют сейсмические свип-сигналы с небольшими интенсивностями на низких частотах в сейсмическом свип-сигнале. Обычно небольшой низкочастотный состав сейсмического свип-сигнала может быть использован в методах экспериментального исследования, проб и ошибок или аналогичных, при этом после того, как исходный сейсмический свип-сигнал послан в пункте диагностики, учитывают геофизические свойства подземной формации, подлежащей анализу, изменяют движущую силу, прикладываемую к реактивной массе, и/или смещение реактивной массы для конкретного сейсмического вибратора, чтобы образовать сейсмический свип-сигнал с более высоким низкочастотным составом. Однако такие методы являются дорогими, требующими больших затрат времени, и при этом возможно, что ни разу не будет генерироваться сейсмический свип-сигнал с оптимальным или близким к оптимальному низкочастотному составу, поскольку, среди прочего, плавное уменьшение движущей силы на низких частотах является запланированным в соответствии с принципами обработки сигналов и не учитываются механические и гидравлические характеристики вибратора. В общем, это изобретение относится к вибросейсмическому способу, а более конкретно, но без ограничения, к оптимизации интенсивности сигналов и/или повышению низкочастотного состава сейсмических сигналов, предназначенных для использования при исследовании буровых скважин и/или подземных формаций. В некоторых вариантах осуществления настоящего изобретения пиковое смещение (пиковые смещения) реактивной массы, относящееся к реактивной массе в сейсмическом вибраторе, предназначенном для регистрации вибросейсмических данных, может быть определено в частотной области независимо от геофизических свойств грунта, на котором сейсмический вибратор должен работать, и использовано для формирования свип-сигнала, вводимого в подземную формацию сейсмическим вибратором. В одном варианте осуществления настоящего изобретения процессор свип-сигнала обрабатывает механические характеристики сейсмического вибратора и использует моделирующую функцию, которая моделирует работу сейсмического вибратора в частотной области, для определения рабочих инструкций по управлению сейсмическим вибратором с целью образования свип-сигнала, предназначенного для ввода в геологическую среду, при этом свип-сигнал охватывает движущую силу и скорость свипирования, оптимизированные относительно низкочастотного состава свип-сигнала. Изобретением предоставляются системы и способы, которые позволяют управлять сейсмическим вибратором, который может быть одно- или многовибраторным источником, так, чтобы получать повышенные/оптимизированные амплитуды низких частот в свип-сигнале, обеспечивать улучшение характеристик при использовании метода проб и ошибок и/или экспериментального метода с получением повышенного низкочастотного состава, при этом методы, наряду с другими неблагоприятными факторами, могут быть дорогими, требующими значительных затрат времени и могут не обеспечивать полного повышения низкочастотного состава свип-сигнала, получаемого от сейсмического вибратора. Настоящее изобретение будет описано в сочетании с сопровождающими чертежами, на которых: фиг. 1 - схематический вид, иллюстрирующий элементы вибросейсмического исследования, такого, какое может быть использовано в осуществлениях настоящего изобретения; фиг. 2А - механическая модель простого сейсмического вибратора, такого, какой может быть использован в вариантах осуществления настоящего изобретения, иллюстрирующая основные компоненты сейсмического вибратора, движущие и реактивные силы между показанными компонентами; фиг. 2В - механическая модель сейсмического вибратора с прижимной массой, такой, какая может быть использована в вариантах осуществления настоящего изобретения, иллюстрирующая основные компоненты сейсмического вибратора, движущие и реактивные силы между показанными компонентами при контакте между сейсмическим вибратором и земной поверхностью; фиг. 2С - электронная схема, эквивалентная механической модели сейсмического вибратора, показанного на фиг. 2В, которая может быть использована для получения зависимости в частотной области между пиковым смещением реактивной массы и движущей силой, согласно осуществлению настоящего изобретения; фиг. 3 - структурная схема системы для формирования свип-сигнала с повышенным низкочастотным составом согласно осуществлению настоящего изобретения; и фиг. 4 - блок-схема последовательности операций с использованием физических свойств сейсмического вибратора вне зависимости от геофизических факторов, предназначенных для получения свип-сигнала с повышенным низкочастотным составом, согласно осуществлению настоящего изобретения. На приложенных чертежах подобные компоненты и/или признаки могут иметь одинаковые позиционные обозначения. Кроме того, различные компоненты одного и того же вида можно распознать по последующему позиционному обозначению и нижнему индексу, который выделяет компонент из числа подобных компонентов. Если в описании используется только первое позиционное обозначение, то обозначение является применимым к любому одному из подобных компонентов, имеющих то же самое первое позиционное обозначение, независимо от второго позиционного обозначения. Для обеспечения полного понимания осуществлений в нижеследующем описании приводятся конкретные детали. Однако специалисту в данной области техники должно быть понятно, что варианты осуществления могут быть использованы на практике без этих конкретных деталей. Например, чтобы не перегружать осуществления ненужными подробностями, схемы могут быть показаны в виде структурных схем. В других случаях, чтобы исключить неясность осуществлений, хорошо известные схемы, процессы, алгоритмы, структуры и способы могут быть показаны без ненужных подробностей. Кроме того, заявитель считает необходимым отметить, что варианты осуществления могут быть описаны как процесс, который отображается блок-схемой последовательности операций, технологической схемой процесса, схемой информационных потоков, структурной схемой или функциональной схемой. Хотя блок-схема последовательности операций может описывать операции как последовательный процесс, многие операции могут быть выполнены параллельно или одновременно. К тому же, порядок операций может быть изменен. Процесс заканчивается после того, как его операции завершены, но могут иметься дополнительные этапы, не включенные в чертеж. Процесс может соответствовать способу, функции, процедуре, стандартной подпрограмме, подпрограмме и т.д. Когда процесс соответствует функции, его завершение соответствует возврату функции к вызывающей функции или главной функции. Кроме того, варианты осуществления могут быть реализованы с помощью аппаратного обеспечения, программного обеспечения, микропрограммных средств, программного обеспечения промежуточного слоя, набора микрокоманд, языков описания аппаратных средств или любого сочетания из них. При реализации с помощью программного обеспечения, микропрограммных средств, программного обеспечения промежуточного слоя или набора микрокоманд программный код или кодовые сегменты для выполнения необходимых задач могут сохраняться на машинно-считываемом носителе, таком как носитель данных. Необходимые задачи могут выполняться процессором (процессорами). Кодовый сегмент может представлять процедуру, функцию, подпрограмму, программу, рутинную подпрограмму, стандартную программу, модуль, пакет программного обеспечения, класс или любое сочетание из инструкций, структур данных или операторов программ. Благодаря передаче и/или приему информации, данных, аргументов, параметров или содержимого памяти кодовый сегмент может быть связан с другим кодовым сегментом или схемами аппаратных средств. Информация, аргументы, параметры, данные и т.д. могут передаваться, пересылаться или посылаться с помощью любого подходящего способа, включая совместное использование памяти, передачу сообщений, передачу маркера, передачу по сети и т.д. В общем, это изобретение относится к вибросейсмическому способу, а более конкретно, но без ограничения, к повышению и/или оптимизации амплитуд низкочастотного состава свип-сигналов, предназначенных для использования при исследовании буровых скважин и/или подземных пластов. Согласно осуществлениям настоящего изобретения может быть выполнен анализ сейсмического вибратора, и пиковое смещение реактивной массы в сейсмическом вибраторе, и/или движущую силу, необходимую для возбуждения реактивной массы до пикового смещения реактивной массы, можно определить в частотной области, и найденное пиковое смещение и/или движущую силу можно использовать в сейсмическом вибраторе для образования свип-сигнала с повышенным низкочастотным составом, предназначенного для инжекции в грунт в течение вибросейсмического анализа. Пиковое смещение и/или возбуждающую силу можно определить на основании эксперимента и/или моделирующих функций. В некоторых осуществлениях пиковое смещение и/или возбуждающую силу можно определять независимо от любых геофизических свойств, относящихся к работе сейсмического вибратора. Системой из фиг. 1 упрощенным образом иллюстрируются элементы вибросейсмической системы регистрации данных, такой, какая может быть использована в вариантах осуществления настоящего изобретения. В показанной системе сейсмический вибратор 10 содержит вибрирующий элемент 11, опорную плиту 12 и устройство 13 измерения сигналов, например множество акселерометров, сигналы которых объединяются с целью определения сигнала фактического толкающего усилия, прикладываемого к грунту сейсмическим вибратором. Сейсмический вибратор 10, показанный на фиг. 1, расположен на грузовике 17, который обеспечивает маневренность системы. Как показано, вибрирующий элемент 11 связан с опорной плитой 12 для передачи вибраций от вибрирующего элемента 11 к опорной плите 12. Опорная плита 12 расположена в контакте с земной поверхностью 16, и, поскольку опорная плита 12 связана с плитой-возбудителем 15, вибрации от вибратора 11 передаются к земной поверхности 16. Сейсмический сигнал, который генерируется вибрирующим элементом 11 и излучается в толщу пород через посредство опорной плиты 12, может быть отражен от границы раздела между подземными импедансами Im1 и Im2 в точках I1, I2, I3 и I4. Этот отраженный сигнал обнаруживается геофонами D1, D2, D3 и D4 соответственно. Сигналы, генерируемые вибрирующим элементом 11 на грузовике 10, также передаются в запоминающее устройство 14 для данных с целью объединения с исходными сейсмическими данными, получаемыми от геофонов D1, D2, D3 и D4, для обеспечения обработки исходных сейсмических данных. В процессе работы управляющий сигнал, также известный как исходный свип-сигнал, побуждает вибрирующий элемент 11 оказывать переменное давление на опорную плиту 12. На фиг. 2А представлена механическая модель простого сейсмического вибратора, такого, какой может быть использован в вариантах осуществлениях настоящего изобретения, иллюстрирующая основные компоненты сейсмического вибратора и движущие и реактивные силы между показанными компонентами. Как показано, сейсмический вибратор 20 содержит реактивную массу 21, связанную с опорной плитой 12, которая находится в контакте с земной поверхностью 16. Движущая сила f1 (23) прикладывается к реактивной массе 21 посредством приводного механизма (непоказанного). Упругое опорное устройство 22 может быть использовано в качестве средства для поддержания реактивной массы 21 в нейтральном положении 24. Упругое опорное устройство 22 может быть устройством, которое поддерживает реактивную массу 21 и обеспечивает смещение реактивной массы 21 около нейтрального положения 24. Только для примера, упругое опорное устройство 22 может быть пружиной, спиралью, гидравлической опорой и/или аналогичным компонентом. В некоторые осуществления упругое опорное устройство 22 может не включаться, и реактивная масса 21 может приводиться в периодическое движение около нейтрального положения непосредственно приводным механизмом. Согласно некоторым аспектам настоящего изобретения нейтральное положение 24 может быть положением, в котором реактивная масса 21 находится в непосредственной близости к опорной плите, но не в контакте с ней. Согласно другим аспектам нейтральное положение 24 может быть положением, в котором реактивная масса 21 расположена так, что она удалена от опорной плиты 12, и вибрационные волны, создаваемые реактивной массой 21, могут быть переданы к опорной плите 12 посредством структуры связи (непоказанной), связывающей реактивную массу 21 с опорной плитой 12. В случае вибросейсмического исследования подстилающих пород под земной поверхностью 16 приводным механизмом может периодически прикладываться сила f1 (23) с тем, чтобы вызывать вибрацию реактивной массы 21 около нейтрального положения 24 и вызывать излучение колебаний в земную поверхность 16 через посредство опорной плиты 12. На фиг. 2В представлена механическая модель сейсмического вибратора с прижимной массой, такой, какая может быть использована в осуществлениях настоящего изобретения, иллюстрирующая основные компоненты сейсмического вибратора, движущие и реактивные силы между показанными компонентами при контакте между сейсмическим вибратором и земной поверхностью. В некоторых осуществлениях настоящего изобретения реактивная масса 21 может поддерживаться упругим опорным устройством 22, а движущая сила 23 может быть приложена к реактивной массе 21 с помощью приводного механизма (непоказанного), который может вызывать вибрацию реактивной массы 21. Когда в осуществлении настоящего изобретения движущая сила 23 прикладывается к реактивной массе 21, сумма сил, действующих на опорную плиту 12, может быть направлена вниз, и поэтому базовой плитой 12 может прикладываться положительное давление к земной поверхности 16 при условии, что ускорение реактивной массы 21 не превышает силы тяжести. Однако во время работы сейсмического вибратора 11 движущая сила 23 может быть такой, что ускорение реактивной массы 21 может превышать силу тяжести примерно в 3 или 4 раза. По этой причине прижимной груз 25 может быть использован для поддержания опорной плиты 12 в контакте с грунтом во время работы сейсмического вибратора 11. В осуществлении настоящего изобретения, таком, какое показано на фиг. 1, масса грузовика 17 может служить для поддержания опорной плиты 12 в контакте с земной поверхностью 16. В некоторых осуществлениях настоящего изобретения изолирующее устройство 26 может быть использовано для связи прижимного груза 25 с опорной плитой 12. Изолирующее устройство 26 может обеспечивать связь прижимного груза 25 с опорной плитой 12 и также обеспечивать изоляцию и/или демпфирование, по меньшей мере частичное, опорной плиты 12 относительно прижимного груза 25. Изоляция и/или демпфирование прижимного груза 25 относительно опорной плиты 12 может использоваться для предотвращения любого перемещения прижимного груза 25, обусловленного взаимодействием с вибрацией опорной плиты 16, создаваемой движением реактивной массы 21. Изолирующее устройство 26 может быть структурой пружинного типа, упругим соединителем и/или аналогичным компонентом. Благодаря упругому опорному устройству 22 и изолирующему устройству 26 существуют соединения между опорной плитой 12 и реактивной массой 21 и прижимным грузом 25, которые могут обеспечивать передачу вибраций между тремя компонентами. Изолирующий амортизатор 36 показан на фиг. 2В для иллюстрации демпфирования и потерь на трение, которые могут возникать между связующим изолирующим устройством 26 опорной плиты 12 и прижимным грузом 25. Аналогично этому пружина 27 реакции земной поверхности и амортизатор 28 реакции земной поверхности показаны на фиг. 2В для иллюстрации реакции земной поверхности 16 на движение опорной плиты 16. Пружина 27 реакции земной поверхности и амортизатор 28 реакции земной поверхности отражают импеданс земной поверхности по отношению к движению опорной плиты 16, при этом импеданс может зависеть от упругости и других физических свойств земной поверхности 16. На фиг. 2В V M (29) представляет собой скорость реактивной массы 21, являющейся результатом приложения движущей силы 23 к реактивной массе 21. На фиг. 2С представлена схематическая электронная схема, эквивалентная механической модели сейсмического вибратора, показанной на фиг. 2В, которая в соответствии с осуществлением настоящего изобретения может быть использована для получения в частотной области зависимости между пиковым смещением реактивной массы и движущей силой. На фиг. 2С конденсатор С1 (54) представляет массу опорной плиты 12, соленоид L1 (60) представляет демпфированную податливость земной поверхности 16 и резистор R1 (62) представляет проводимость в результате демпфирования грунта. Аналогично этому конденсатор С2 (56) представляет массу реактивной массы 21, соленоид L2 представляет демпфирование, создаваемое упругим опорным устройством 22, конденсатор С3 (58) представляет массу прижимного груза 25, соленоид L3 (66) представляет демпфирование, создаваемое изолирующим устройством 26, и резистор R3 (64) представляет потери на демпфирование изолирующего устройства 26. На практике потери на демпфирование изолирующего устройства 26 являются пренебрежимо малыми, и для задач моделирования ими можно пренебречь. В таблице ниже показано взаимное соответствие механических и электрических символов (при соответствующих единицах) из фиг. 2В и 2С. В осуществлениях настоящего изобретения электронная схема, показанная на фиг. 2С, может быть использована для получения моделирующей функции для конкретного сейсмического вибратора, на основании значения которой может быть определена минимальная частота, при которой максимальная движущая сила может использоваться без превышения максимального смещения реактивной массы; при этом максимальное смещение реактивной массы является величиной, которая представляет собой характеристику конструкции сейсмического вибратора, которая может быть задана изготовителем сейсмического вибратора, определена экспериментально и/или определена теоретически. Смещение реактивной массы 21 может быть измерено относительно места, в котором реактивная масса 21 находится в покое, может быть измерено от нейтрального положения 24 или может быть измерено от положения, в котором реактивная масса 21 находится в непосредственной близости к опорной плите 12. Моделирующая функция может быть использована для получения модели смещения реактивной массы как функции частоты и обеспечивает определение фазы свип-сигнала и движущей силы на низких частотах, при которых делается возможной передача максимальной энергии в грунт с учетом механических связей сейсмического вибратора. Для задач моделирования сейсмического вибратора f md можно использовать для обозначения минимальной частоты, при которой максимальная движущая сила (DF) может быть использована без превышения максимального смещения реактивной массы. По этой причине в некоторых осуществлениях движущая сила, используемая для предотвращения превышения максимального хода, которая может быть приложена к реактивной массе 21 на частотах ниже, чем f md , может быть аппроксимирована как При этом уравнение (1) может быть получено на основании эквивалентной электрической схемы базового вибратора. На фиг. 2С генератор 40 тока создает ток i DF (42). Ток i DF (42) может быть использован при модельном анализе для представления движущей силы DF, прикладываемой к реактивной массе 21. Видно, что ток i DF (42) зависит от импеданса, который может быть зависимым от массы реактивной массы 21, податливости подвески реактивной массы, массы опорной плиты 12 и/или приповерхностных упругих свойств земной поверхности 16, которые могут рассматриваться как сочетание двух параметров, таких как податливость грунта/почвы и демпфирование грунта/почвы. Передаточная функция между скоростью V m (39) реактивной массы и движущей силой, которая для задач моделирования может считаться импедансом, обнаруживаемым в электрической схеме, показанной на фиг. 2С, при генераторе тока i DF , в соответствии с электрическими характеристиками схемы имеет вид где Z eq может быть преобладающим на низких частотах благодаря реактивной массе 21 или для задач моделирования в эквивалентной электрической схеме, показанной на фиг. 3С, благодаря сумме проводимостей конденсатора С2 (56) и соленоида L2 (52). В моделирующих функциях из некоторых осуществлений настоящего изобретения используется то обстоятельство, что для многих сейсмических вибраторов Z eq на низких частотах, т.е. частотах ниже чем около 10 Гц, по существу, не зависит от коэффициентов податливости и/или демпфирования грунта, который находится в контакте с сейсмическим вибратором. В таких осуществлениях смещение реактивной массы в частотной области можно смоделировать с помощью следующей моделирующей функции: Согласно осуществлению настоящего изобретения моделирование смещения реактивной массы в частотной области может быть выполнено с использованием параболической аппроксимации моделирующей функции из уравнения (7) в соответствии со следующим: В осуществлениях настоящего изобретения моделирующая функция из уравнения (7) и параболическая аппроксимация из уравнения (8) могут быть использованы для получения профиля движущей силы из уравнения (1) при условии, что движущая сила, прикладываемая к реактивной массе в сейсмическом вибраторе, не превышает максимального смещения. Тем самым, уравнение (1) может быть использовано для расчета низкочастотного конца сигнала качающейся частоты в случае заданной спектральной плотности (esd(f)) энергии привода. Однако заявитель отмечает, что толкающее усилие и спектральная плотность энергии, фактически подводимые в грунт, могут быть получены точно только в случае, если являются известными свойства почвы/грунта, на котором сейсмический вибратор расположен. Скорость SR(f) свипирования, необходимая для получения esd(f), может быть определена в соответствии со следующим уравнением: Отрезок времени, на котором мгновенная частота f i подводится в грунт, может быть определен в соответствии со следующим: где f min является минимальной частотой, представляющей интерес, и t i (f i ) является монотонной функцией f i , которая может быть численно обращена для получения зависящей от времени мгновенной частоты, подводимой в грунт, Наконец, амплитуды свип-сигналов могут быть представлены в следующем виде: где α представляет собой начальную фазу, задаваемую пользователем. В некоторых осуществлениях, в которых технические требования к энергии приводят к продолжительным свип-сигналам, т.е. к высокому значению t i (f max ), поскольку продолжительное время затрачивается на свипирование на низких частотах, большее количество вибраторов может быть использовано для получения требуемого свип-сигнала. В еще одном осуществлении раскрытого изобретения профиль движущей силы рассчитывают, используя не аппроксимированное смещение реактивной массы в соответствии с уравнением (7). В таком осуществлении расчет скорости свипирования может быть идентичен расчету, описанному выше с использованием параболической аппроксимации смещения реактивной массы из уравнения (8). Согласно осуществлениям настоящего изобретения от пользователя может требоваться только ввод лишь геофизических и механических характеристик для сейсмического вибратора, которые могут быть взяты из сводных таблиц, предоставляемых изготовителем сейсмического вибратора, чтобы получить профиль движущей силы для свип-сигнала с повышенным низкочастотным составом. Как рассматривалось выше, характеристиками грунта/почвы можно пренебречь. В отличие от этого для существующих способов определения рабочих характеристик сейсмических вибраторов с целью формирования частот свип-сигнала могут требоваться обратная связь и корректировка и/или технические характеристики, определяемые в частотной области, например желаемый спектр мощности, и во временной области, например огибающая усилия привода, последняя является тем, что точно неизвестно. На фиг. 3 представлена структурная схема системы, предназначенной для формирования свип-сигнала с повышенным низкочастотным составом в соответствии с осуществлением настоящего изобретения. Согласно осуществлению настоящего изобретения сейсмический вибратор 10 содержит реактивную массу 21, которая приводится в движение механизмом 22 движущей силы. Механизм 22 движущей силы может быть гидравлическим механизмом, поршневым механизмом и/или аналогичным. При приведении в движение реактивная масса 20 вибрирует около положения покоя. В осуществлении настоящего изобретения опорная плита 12 обеспечивает контакт между сейсмическим вибратором 10 и земной поверхностью 16, сквозь которую вибрационные волновые цуги (сейсмические свип-сигналы) могут излучаться в подземную геологическую среду. Согласно некоторым аспектам движение реактивной массы 20 может побуждать опорную плиту 12 приходить в контакт с земной поверхностью 16 и в этой связи прижимной груз 25 может быть связан с опорной плитой 12 для удержания опорной плиты 12 в контакте с земной поверхностью 16. Механизм 22 движущей силы может приводить реактивную массу в периодическое движение для создания вибраций с различными частотами, и эти вибрации могут быть переданы к земной поверхности 16 опорной плитой 12. Механизм 22 движущей силы может смещать реактивную массу 20 периодически около положения, в котором реактивная масса находится в покое. Сейсмический вибратор 10 может быть сконфигурирован так, что для каждой вибрационной частоты реактивной массы 21 может быть максимальное смещение, на которое реактивная масса 21 может быть смещена от положения покоя и/или от опорной плиты 12; при этом максимальное смещение представляет собой предел, до которого реактивная масса 20 может быть смещена, так что приводной механизм 22 может функционировать на этой частоте и/или опорная плита 12 может поддерживаться в контакте с земной поверхностью 16. Согласно осуществлению настоящего изобретения физические характеристики, относящиеся к сейсмическому вибратору 10, могут быть введены в процессор 27. Физические характеристики могут содержать движущую силу, получаемую от приводного механизма 22, максимально возможное смещение реактивной массы 20 для одной или нескольких частот, пиковое смещение реактивной массы 20 и среднюю частоту для пикового смещения, при этом пиковое смещение представляет собой предельное смещение реактивной массы, возможное для сейсмического вибратора 10 при практической работе сейсмического вибратора 10, частотные ограничения сейсмического вибратора и/или аналогичные характеристики. Физические характеристики могут задаваться как эксплуатационные ограничения сейсмического вибратора 10. Смещение реактивной массы 20 может быть определено от среднего положения покоя реактивной массы 20, от положения, при котором реактивная масса 20 находится в непосредственной близости к опорной плите 12 и т.п. Согласно осуществлению настоящего изобретения в процессоре 27 может использоваться моделирующая функция для обработки физических характеристик с целью определения максимального смещения реактивной массы 20 для случая низкочастотного выходного сигнала, который может излучаться сейсмическим вибратором 10. Согласно некоторым аспектам в процессоре 27 может использоваться моделирующая функция, охарактеризованная в уравнении (7), для определения максимальных смещений реактивной массы 20 на низких частотах, которые может генерировать сейсмический вибратор 10. Согласно другим аспектам в процессоре 27 может использоваться параболическая аппроксимация из уравнения (7) для установления максимальных смещений реактивной массы 20 на низких частотах, которые может генерировать сейсмический вибратор 10. В некоторых осуществлениях настоящего изобретения процессор 27 может формировать сейсмический свип-сигнал для максимизации низкочастотного состава без получения каких-либо данных, касающихся физических свойств земной поверхности 16. В других осуществлениях физические свойства земной поверхности 16, такие как упругость, демпфирование и/или аналогичные, могут быть введены в процессор 27, и процессор 27 может включить эти физические свойства в моделирующую функцию для формирования сейсмического свип-сигнала с максимальным низкочастотным составом. В процессоре 27 моделирующая функция может использоваться для формирования волнового цуга/сигнала качающейся частоты, при этом волновой цуг/сигнал качающейся частоты ограничен огибающей смещения в зависимости от максимально возможного смещения для каждой частоты в волновом цуге/сигнале качающейся частоты для реактивной массы 20 сейсмического вибратора 10. Этот сигнал качающейся частоты может быть передан из процессора 27 в контроллер 21 для обеспечения возбуждения приводным механизмом 22 реактивной массы 20 с целью вывода выходного волнового цуга/сигнала качающейся частоты в земную поверхность 16, при этом каждая из выходных частот выходного волнового цуга/сигнала качающейся частоты имеет амплитуду, близкую к максимально возможной амплитуде, огибающей, получаемой от сейсмического вибратора 10. Согласно некоторым аспектам для снижения требований в части обработки, стоимости или времени процессор 27 может моделировать только низкие частоты и поставлять низкочастотные параметры, которые могут добавляться в стандартный сейсмический свип-сигнал. Таким способом процессор 27 может обеспечивать повышение низкочастотного состава в стандартном сейсмическом свип-сигнале. Только для примера, процессор 27 может моделировать максимальное смещение реактивной массы для частот от 10 Гц или ниже. На фиг. 4 показан свип-сигнал с повышенным низкочастотным составом, создаваемый сейсмическим вибратором согласно осуществлению настоящего изобретения, и свип-сигнал, создаваемый обычным сейсмическим вибратором. В осуществлении настоящего изобретения моделируют максимальное смещение реактивной массы для одной или нескольких низкочастотных вибраций, и эту информацию используют для сигнала качающейся частоты, чтобы получить выходной свип-сигнал 70 от сейсмического вибратора, который имеет максимальный выходной формат низких частот по сравнению со стандартным свип-сигналом без моделирования смещения реактивной массы. На фиг. 4 представлена блок-схема последовательности операций, предназначенных для обеспечения функционирования сейсмического вибратора с целью формирования свип-сигнала с повышенным низкочастотным составом, согласно осуществлению настоящего изобретения. На этапе 510 может быть выполнен анализ физических свойств сейсмического вибратора и могут быть определены в частотной области характеристики пикового смещения реактивной массы для реактивной массы сейсмического вибратора. Характеристика пикового смещения реактивной массы может быть пиковым смещением реактивной массы для частоты, которая может быть получена от сейсмического вибратора. Специалисты в данной области техники могут понять, что смещение реактивной массы может быть связано с движущей силой, прилагаемой к реактивной массе. Согласно некоторым аспектам пиковое смещение реактивной массы на конкретной частоте может быть определено экспериментально для конкретного сейсмического вибратора. Эксперименты могут быть выполнены для одной или нескольких частот, подлежащих использованию в вибросейсмическом свип-сигнале, и пиковое смещение реактивной массы может быть определено для одной или нескольких частот. Эксперименты могут быть выполнены для обеспечения функционирования сейсмического вибратора с тем, чтобы он генерировал низкие частоты вибросейсмического свип-сигнала. В качестве варианта или в сочетании с предыдущим пиковое смещение реактивной массы для множества частот в вибросейсмическом свип-сигнале может быть определено, и аппроксимация функциями может быть подобрана для результатов и использована в качестве моделирующей функции при определении пикового смещения реактивной массы для одной или нескольких частот в вибросейсмическом свип-сигнале. Согласно другим аспектам пиковое смещение реактивной массы может быть определено на основании моделирующей функции, моделирующей работу сейсмического вибратора, такой, какая воспроизведена выше в уравнении (7). В осуществлениях настоящего изобретения экспериментальное определение пикового смещения реактивной массы в частотной области, аппроксимация функциями пикового смещения реактивной массы в частотной области и/или использование моделирующей функции с целью определения пикового смещения реактивной массы в частотной области для сейсмического вибратора может быть выполнено без рассмотрения геофизических свойств подлежащей исследованию подземной формации и/или буровой скважины. На этапе 520 пиковое смещение реактивной массы для реактивной массы сейсмического вибратора для одной или нескольких частот может быть использовано с целью определения рабочих установок для сейсмического вибратора с целью генерирования вибросейсмического свип-сигнала, при этом за счет использования пикового смещения реактивной массы энергия, инжектируемая в грунт при свипировании, повышается. В осуществлениях настоящего изобретения сейсмический вибратор может возбуждаться в соответствии с параметрами, определенными на этапе 510 для обеспечения низкочастотного состава в вибросейсмическом импульсе, подлежащем генерированию сейсмическим вибратором, с целью инжекции вибросейсмического свип-сигнала в грунт, при этом вибросейсмический свип-сигнал может иметь повышенный низкочастотный состав. На этапе 530 реактивную массу сейсмического вибратора возбуждают, задавая движущие силы такими, чтобы в грунт инжектировался свип-сигнал с повышенным низкочастотным составом. На этапе 540 может быть выполнен анализ вибрационного сигнала, принятого приемником в результате инжекции свип-сигнала в грунт, и может быть выполнен анализ подземной формации и/или буровой скважины. Хотя выше даны подробные описания одного или нескольких осуществлений изобретения, различные варианты, модификации и эквиваленты должны быть очевидными для специалистов в данной области техники без отступления от сущности изобретения. Более того, кроме как в случаях, когда ясно не показано иное или другим образом специально не отмечено, должно предполагаться, что признаки, устройства и/или компоненты из различных осуществлений могут быть заменены и/или объединены. Поэтому приведенное выше описание не должно восприниматься как ограничивающее объем изобретения, который определяется прилагаемой формулой изобретения. |